Abstract
Neuromorphic vision sensors are biologically inspired devices which differ fundamentally from well known frame-based sensors. Even though developments in this research area are increasing, applications that rely entirely on event cameras are still relatively rare. This becomes particularly clear when considering real outdoor scenarios apart from laboratory conditions.
One obstacle to the development of event-based vision applications in this context may be the lack of labeled datasets for algorithm development and evaluation. Therefore we describe a recording setting of a DVS-based long time monitoring of an urban public area and provide labeled DVS data that also contain effects of environmental outdoor influences recorded in this process. We also describe the processing chain used for label generation, as well as results from a performed denoising benchmark utilizing various spatio-temporal event stream filters.
The dataset contains almost 7 hours of real world outdoor event-data with approx. 47k labeled regions of interest.
Environmental outdoor influences
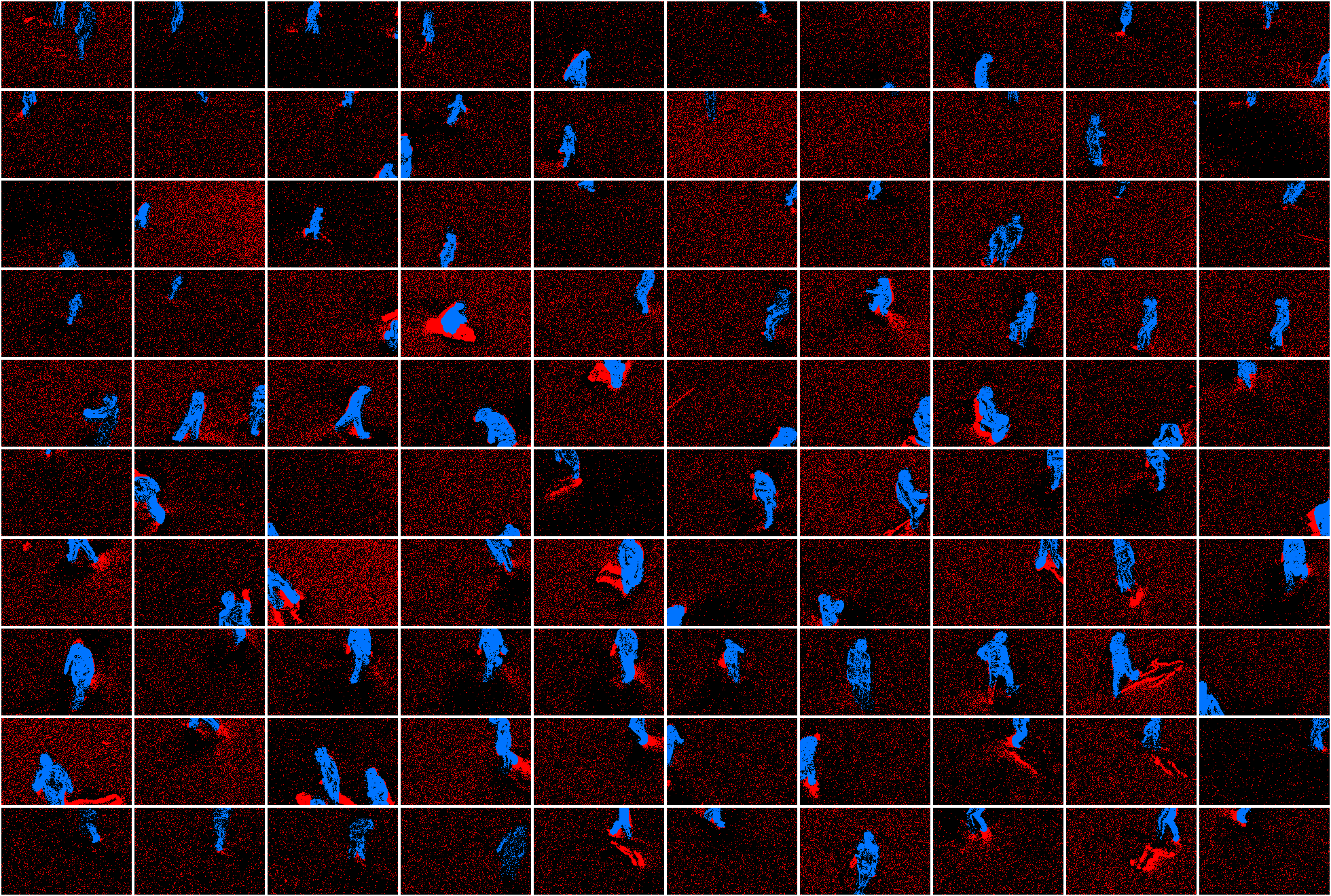
Objects of interest
Label Snippets
Click on picture for more colorized label examples:
Contact
If you have any questions please contact:
Person:
Tobias Bolten
Email:
tobias.bolten [at] hs-niederrhein.de